Android系统传感器的使用
本文实现了手机6轴数据的显示,源码见 github 项目 AndroidSensor。
1.Android系统传感器
1.1 内置传感器种类
- 运动相关
测量三个轴上的加速力和旋转力。
包括:加速度计、重力传感器、陀螺仪和旋转矢量传感器 - 环境相关
测量环境参数,例如:气温、气压、光照和湿度
包括:温度计、气压计、光度计和湿度计 - 位置相关
测量设备的物理位置
包括:磁力计、距离传感器
1.2 基于硬件的传感器列表
TYPE_ACCELEROMETER 加速度计
三个轴上的加速度(包含重力),单位m/s^2
数据:SensorEvent.values[3] xyz轴加速度
原理:测量惯性力。
模型:一个小球在一个方盒子中,每面墙都能感测压力。
检测到力的方向与它惯性力(加速度)的方向是相反的。TYPE_GYROSCOPE 陀螺仪
三个轴上的旋转角速度,单位rad/s
数据:SensorEvent.values[3] xyz轴旋转角速度
原理:角动量守恒。高速转动中地的转子具有惯性,
有抗拒方向改变的趋向,它的旋转轴永远指向一固定方向。
模型:旋转轴、转子、旋转轮、两个平衡环。
旋转轮静止,平衡环转动,旋转轮受力。TYPE_MAGNETIC_FIELD 磁力计
三个轴上的环境地磁场强度,单位μT
原理:测量外界磁场
1.3 基于软件的传感器列表(从一个或多个基于硬件的传感器派生其数据)
TYPE_GRAVITY 重力
三个轴上的重力,单位m/s^2
数据:SensorEvent.values[3] xyz轴重力TYPE_LINEAR_ACCELERATION 线性加速度
三个轴上的加速度(不包括重力),单位m/s^2
数据:SensorEvent.values[3] xyz轴线性加速度TYPE_ROTATION_VECTOR 旋转矢量
用于运动检测,如检测手势、监测角变化、监测相对方位变化
依赖:加速度计、磁力计和陀螺仪
数据:SensorEvent.values[4]
沿 xyz 轴的旋转矢量分量+旋转矢量的标量分量TYPE_GAME_ROTATION_VECTOR 游戏旋转矢量传感器
不使用地磁场,Y轴不会指向北方,而是指向参照物TYPE_GEOMAGNETIC_ROTATION_VECTOR 地磁旋转矢量传感器
不使用陀螺仪,准确度低于正常旋转矢量传感器,但功耗低
2.描述物体运动姿态
2.1 坐标系
机身坐标系: 右手直角坐标系(右上外)
X轴水平向右,Y轴垂直向上,Z轴垂直屏幕向外
大地坐标系:东北天坐标系
X轴指向东,Y轴指向北,Z轴指向天空
旋转的方向按右手法则定义
右手大拇指指向轴向,四指弯曲的方向为绕该轴旋转的方向
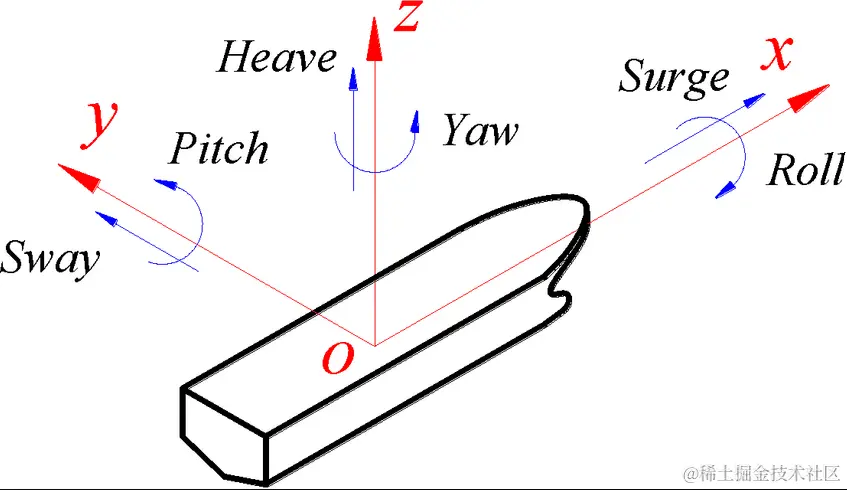
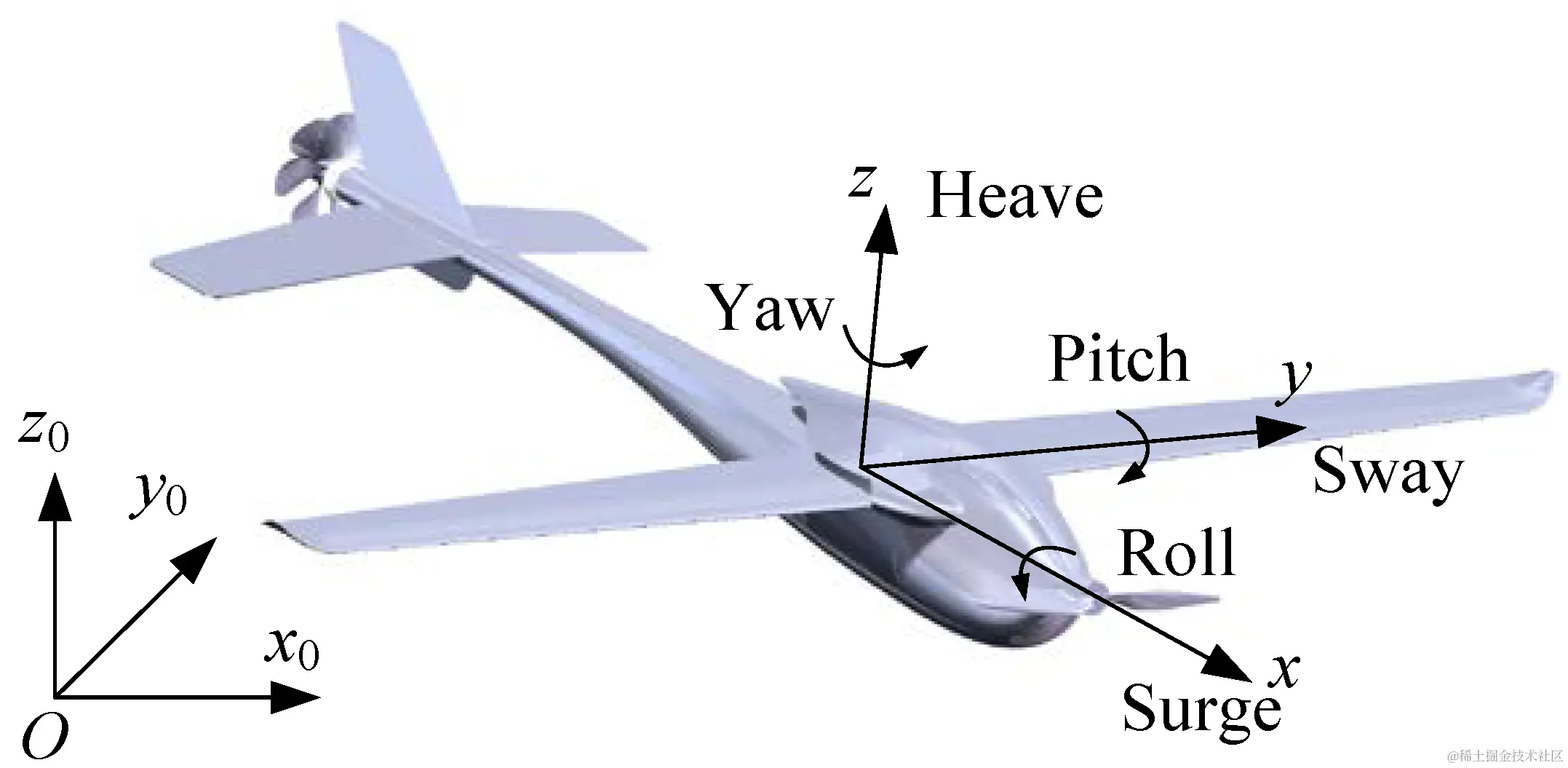
2.2 六自由度方向
X轴平行于船体基线指向船首,Y轴指向船体左侧,Z轴垂直于船体基线向上
- roll 飞行器横滚,船舶横摇
围绕X轴的角度,取值范围为[-180,180],单位°,当模组完全水平时为0 - pitch 飞行器俯仰,船舶纵摇
围绕Y轴的角度,取值范围为[-90,90],单位°,当模组完全水平时为0 - yaw 飞行器偏航,船舶首摇
围绕Z轴的角度,取值范围为[-180,180],单位°,当X轴指向正北时为0 - surge 飞行器纵移,船舶纵荡
X轴加速度 - sway 飞行器横移,船舶横荡
Y轴加速度 - heave 飞行器升降,船舶垂荡
Z轴加速度
3.Android系统传感器
3.1 获取传感器数据
1 | //传感器服务 |
3.2 计算屏幕方向
1 | float[] rotationMatrix = new float[9];//屏幕的旋转矩阵 |
4.效果图